|
Unidades: 0
|
Total 0,00€
|
|
Envio grátis por pedido superior a100 |
|





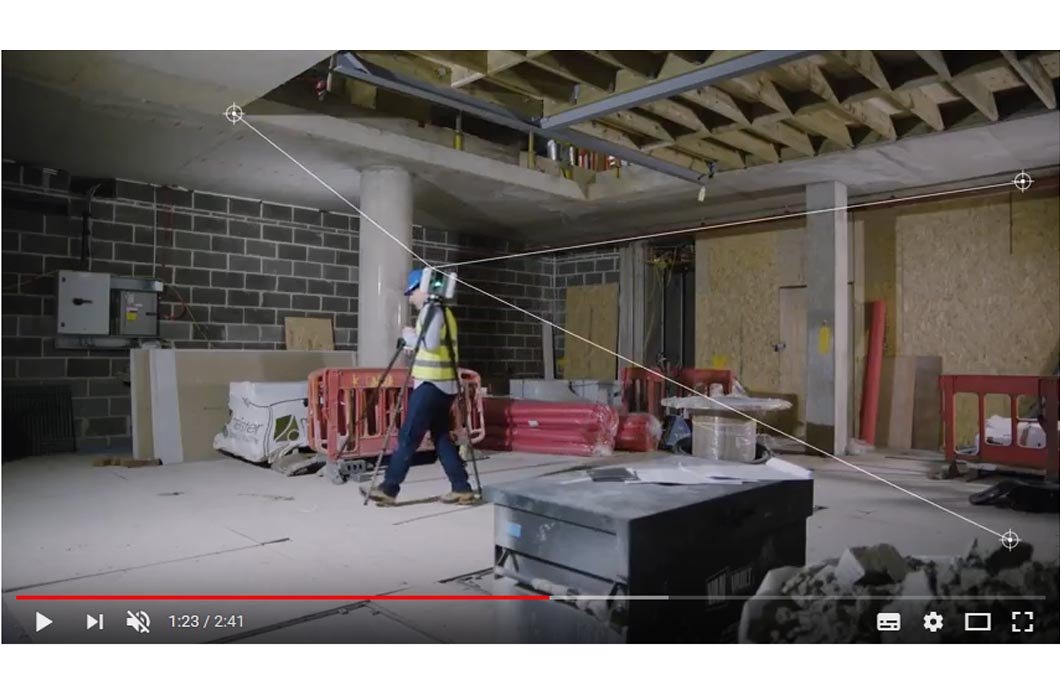
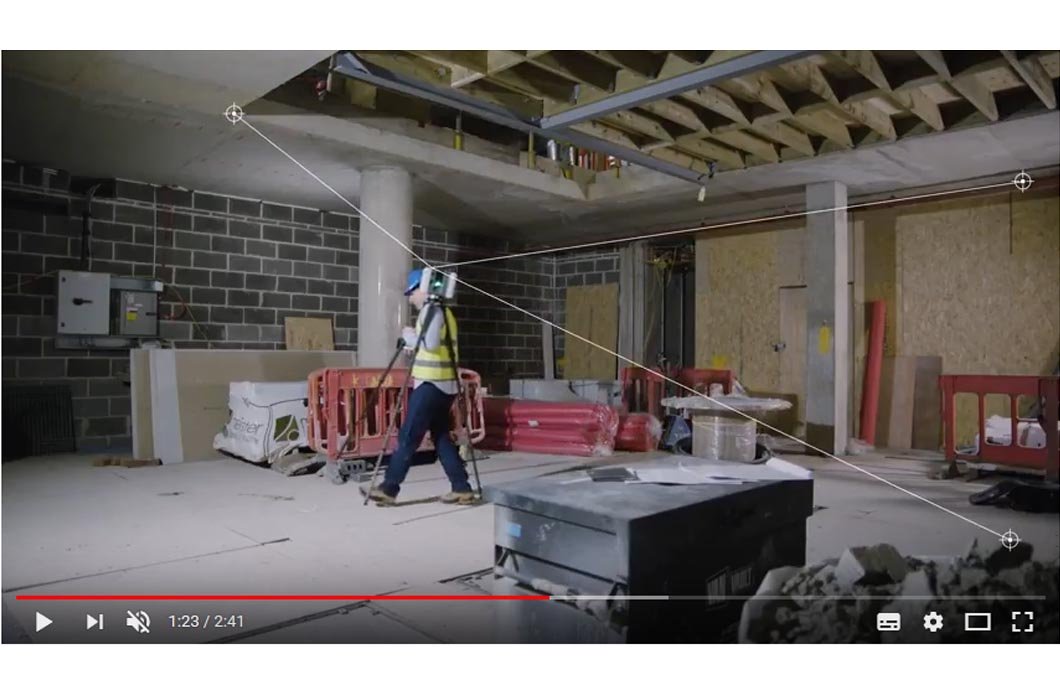
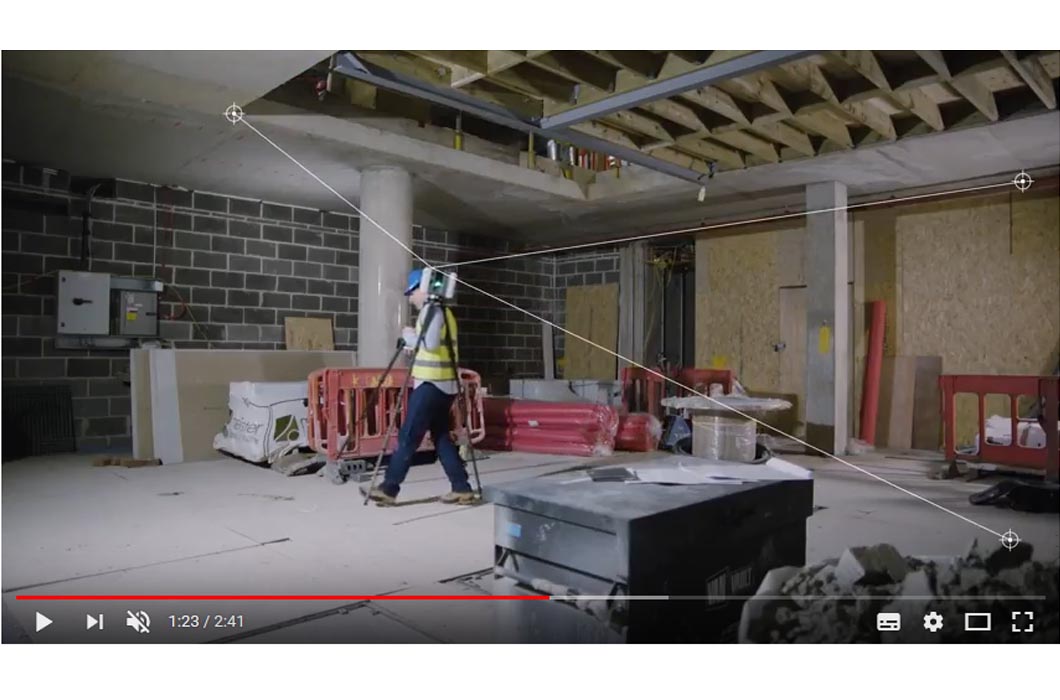
O Scanner laser Leica RTC360 LT é rápido, ágil e preciso. Capta ambientes completos em 3D com precisão, graças às suas câmaras esféricas e à dupla digitalização que elimina erros nas sobreposições.
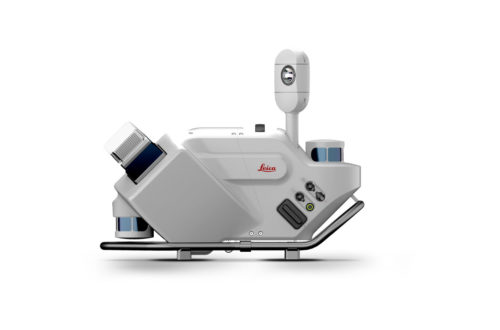
 Scanner laser Leica RTC 360 LT
Scanner laser Leica RTC 360 LTO Leica RTC360 é um scanner a laser de alto rendimento, tamanho médio e leve para captação em tempo real de nuvens de pontos 3D, imagens esféricas de alta resolução e sensores adicionais para o suporte de registo automático.
Software de recompilação de dados executável em tablets iOS ou Android, o que permite um controlo de qualidade directamente no local.
O software de preparação de dados de escritório Leica Cyclone REGISTER 360 converte os dados do local em nuvens de pontos combinados uniformes, preparados para ser publicados em formatos standard para visualização, edição e troca de dados entre vários operadores intervenientes na obra graças à integração da nuvem da Leica Geosystems.
Características
 O registo baseado na aplicação e os dados de etiquetado são devolvidos automáticamente do tablet para o scanner
O registo baseado na aplicação e os dados de etiquetado são devolvidos automáticamente do tablet para o scannerTransferência de dados do scanner para o computador do escritório através de uma memória USB
Incorpora câmaras de visão esférica em 3D para uma captação de 2.000.000 de pontos por segundo
Comunicação sem fios bidireccional entre o scanner e o tablet
| Geral | Operativo | ||
| Scanner laser 3D | Alta velocidade de digitalização em 3D com integração HDR e sistema esférico de captação com (VIS) Sistema Inercial Visual para uma captação em tempo real
|
No scanner | Écran táctil com resolução de 480 x 800 píxels |
| Características de captação | Dispositivos móveis | Aplicação Leica Cyclone para Ipad ou Android incluí:
– Controlo remoto – Visualização 2D/3D – Alinhamento automático do scanner |
|
| Captação de dados | <2 minutos para uma captação completa em modo esférico com HDR e uma imagem a 6mm @ 10mm de resolução | Armazenamento | Leica M256, 256GB com porta USB 3.0 |
| Registo em tempo real | Criação de nuvem de pontos alinhada à base em tempo real de digitalização sobre (VIS) com o sistema de vídeo inercial | Design | |
| Dupla digitalização | Elimina objectos duplicados | Embalagem | Alumínio com coberturas |
| Digitalização | Dimensões | 120mm x 240mm x 230mm / 4.7‘‘ x 9.4‘‘ x 9.1‘‘ | |
| Distância de medição | Alta velocidade, com alto nível de digitalização de onda (WFD) | Peso | 5.35kg sem baterias |
| Tipo de laser | 1 IEC 60825-1:2014, 1550 invisível | Mecanismo montado | Montagem rápida com adaptador 5,8” para tripé |
| Campo de visão | 360° (horizontal) / 300° (vertical) | Alimentação | |
| Classificação | Min. 0.5 – até 130 m | Bateria interna | 2 baterias GEB361 de lítio recarregáveis.
Duração: Apróx. 4 horas |
| Resolução | 3 tipos seleccionáveis (3/6/12 mm @ 10mm) | Alimentação por cabo | Leica GEV282 AC adapter |
| Precisão | Precisão angular 18”
Faixa precisão 1.0 mm + 10 |
Ambiente | |
| Intervalo de ruído | 0.4 mm @ 10 m, 0.5 mm @ 20 m | Temperatura operativa | -5º a + 40º C |
| Imagem | Temperatura armazenamento | -40 º a + 70º C | |
| Câmara | 36 MP sistema de captação de 3 câmaras
432 MPx raw dados para calibração 360° x 300° imagem esférica |
Pó/Humidade | Protecção IP54 |
| Velocidade | 1 minuto para uma captação completa com um ponto de luz | ||
| HDR | Automático | ||
| Sensores de navegação | |||
| Sistema visual interno | Vídeo sensor com medição inercial que relativiza a posição em tempo real | ||
| Tilt | Baseado em IMU precisão 3” | ||
| Sensores adicionais | Altímetro, Compass, GNSS |