|
Unidades: 0
|
Total 0,00€
|
|
Envío gratis por pedido superior a 100 |
|





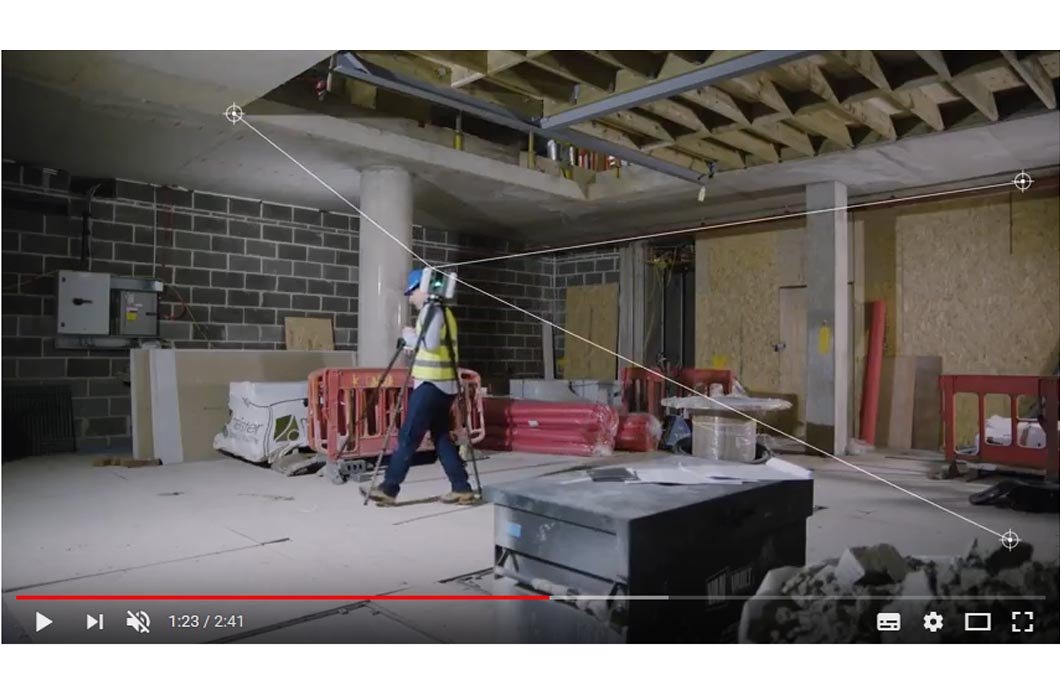
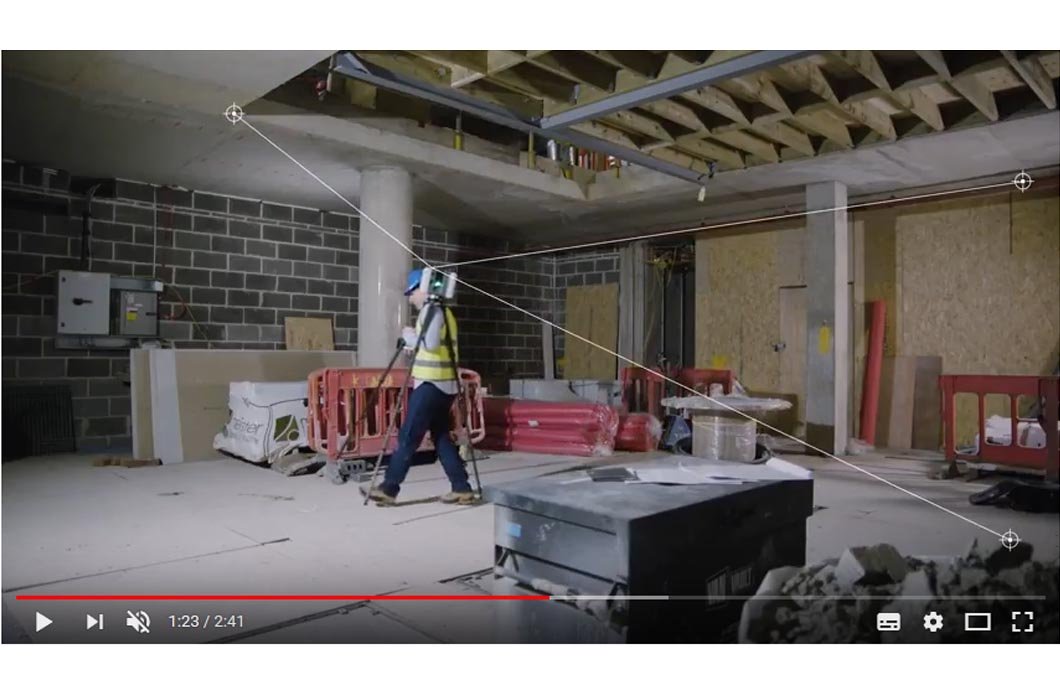
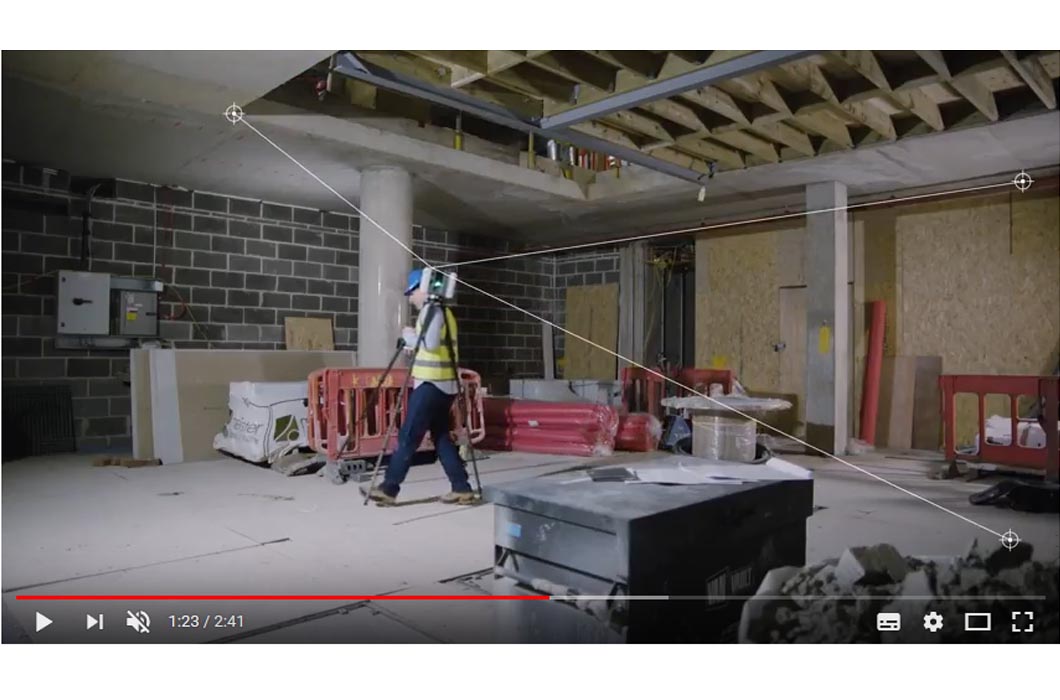
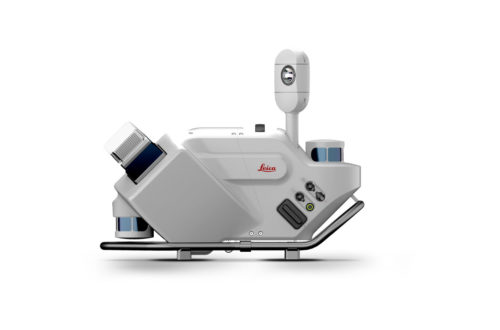
El escáner láser Leica RTC360 LT es rápido, ágil y preciso. Captura entornos completos en 3D con precisión, gracias a sus cámaras esféricas y su doble escaneo que elimina errores en los solapes
 Láser escáner Leica RTC 360 LT
Láser escáner Leica RTC 360 LTLeica RTC360 es un escáner láser de alto rendimiento, tamaño mediano y ligero para la captura en tiempo real de nubes de puntos 3D, imágenes esféricas de alta resolución y sensores adicionales para el soporte del registro automático.
Software de recopilación de datos que se ejecuta en tabletas estándar iOS o Android, lo que permite un control de la calidad directamente en el campo.
El software de preparación de datos de oficina Leica Cyclone REGISTER 360 convierte los datos de campo en nubes de puntos combinados uniformes, listos para ser publicados en formatos estándar para la visualización, edición e intercambio de datos entre los distintos operadores intervinientes en la obra gracias a la integración de la nube de Leica Geosystems.
Características
 El registro basado en la aplicación y los datos de etiquetado se devuelven automáticamente de la tableta al escáner
El registro basado en la aplicación y los datos de etiquetado se devuelven automáticamente de la tableta al escánerTransferencia de datos del escáner a la computadora de la oficina a través de una memoria USB
Incorpora cámaras de visión esférica en 3D para una captura de 2.000.000 de puntos por segundo
Comunicación inalámbrica bidireccional entre el escáner y la tableta
| General | Operativo | ||
| Láser escaner 3D | Alta velocidad de escaneo en 3D com integración HDR y sistema esférico de captura con (VIS) Sistema Inercial Visual para una captura en tiempo real
|
En escaner | Pantalla táctil con resolución de 480 x 800 píxeles |
| Características de captura | Dispositivos móviles | Aplicación Leica Cyclone para Ipad o Android incluye:
-Control remoto -Visualización 2D/3D -Alineación automática de escáner |
|
| Captura de datos | <2 minutos para una captura completa en modo esférico con HDR y una imagen a 6mm @ 10mm de resolución | Almacenamiento | Leica M256, 256GB con puerto USB 3.0 |
| Registro en tiempo real | Creación de nube de puntos alineada a la base en tiempo real de escaneado sobre (VIS) con el sistema de vídeo inercial | Diseño | |
| Doble escaneado | Elimina objetos duplicados | Carcasa | Aluminio con coberturas |
| Escaneado | Dimensiones | 120mm x 240mm x 230mm / 4.7‘‘ x 9.4‘‘ x 9.1‘‘ | |
| Distancia de medición | Alta velocidad, con alto nivel de digitalización de onda (WFD) | Peso | 5.35kg sin baterías |
| Tipo de láser | 1 IEC 60825-1:2014, 1550 invisible | Mecanismo montado | Montaje rápido con adaptador 5,8” para trípode |
| Campo de visión | 360° (horizontal) / 300° (vertical) | Alimentación | |
| Rango | Min. 0.5 – hasta 130 m | Batería interna | 2 baterías GEB361 de litio recargables.
Duración: Aprox. 4 horas |
| Resolución | 3 tipos seleccionables (3/6/12 mm @ 10mm) | Alimentación por cable | Leica GEV282 AC adapter |
| Precisión | Precisión angular 18”
Rango precisión 1.0 mm + 10 |
Entorno | |
| Rango de ruido | 0.4 mm @ 10 m, 0.5 mm @ 20 m | Temperatura operativa | -5º a + 40º C |
| Imagen | Temperatura almacenamiento | -40 º a + 70º C | |
| Cámara | 36 MP sistema de captura de 3 cámaras
432 MPx raw datos para calibración 360° x 300° imagen esférica |
Polvo/Humedad | Protección IP54 |
| Velocidad | 1 minuto para una captura completa con un punto de luz | ||
| HDR | Automático | ||
| Sensores de navegación | |||
| Sistema visual interno | Vídeo sensor con medición inercial que relativiza la posición en tiempo real | ||
| Tilt | Basado en IMU precisión 3” | ||
| Sensores adicionales | Altímetro, Compass, GNSS |